IELS: Indoor Equipment Localization System: Conclusion (Part 6/6 final) (IoT) 08-02-202227-07-2018 by Maytham Fahmi Conclusion We conclude there is a gap between a few of the mentioned research papers and the commercial products. Most researches are missing the practical usage of iBeacons and focus primarily on specific problems. However, all commercial solutions does not offer free-of-cost solutions. We think there is a place for Open Source standard software for…. ShareTweetSharePin
IELS: Indoor Equipment Localization System: Discussion (Part 5/6) (IoT) 08-02-202226-07-2018 by Maytham Fahmi Discussion When this project started, the idea was simple. The goal was to localize objects inside a building environment in an easy and affordable way. This idea turned out to be a wide research area, and lead to try different approaches as explained in this chapter. We think adding walking steps, compass and gyros sensor…. ShareTweetSharePin
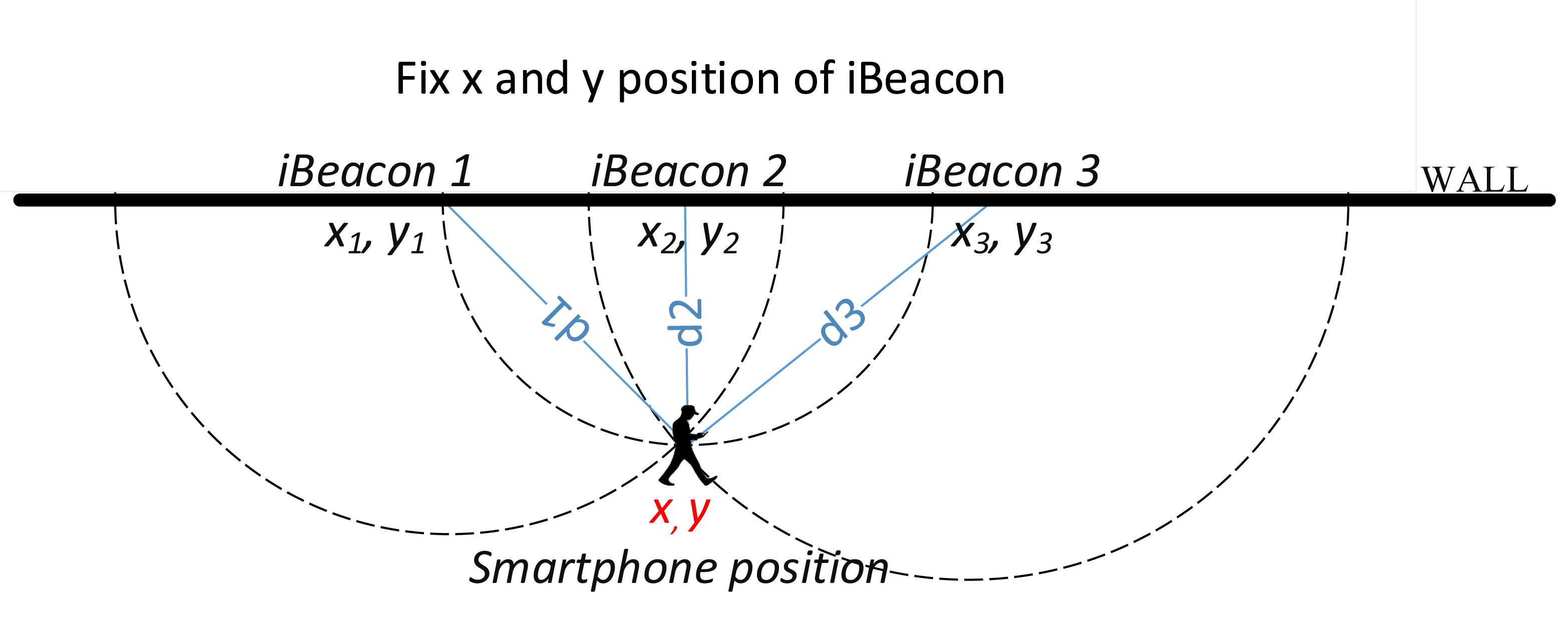
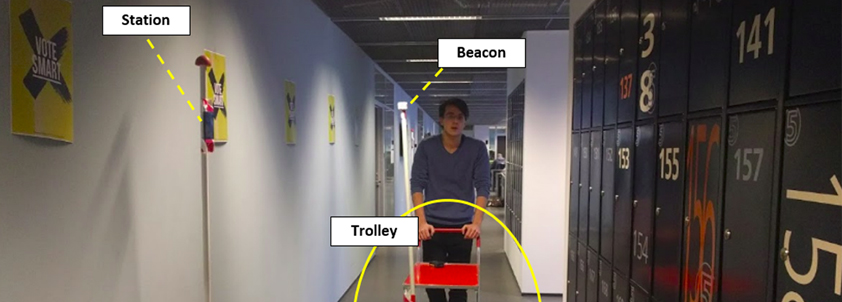
IELS: Indoor Equipment Localization System: Evaluation (Part 4/6) (IoT) 08-02-202219-07-2018 by Maytham Fahmi Evaluation Evaluation is important and a key process in a project completion. This evaluation is to present the results of our system, for locating the trackable object position and track its (movement) repositioning over time using mobile smartphones as data collectors. The usability of the system relies on the results collected from mobile smartphone over…. ShareTweetSharePin
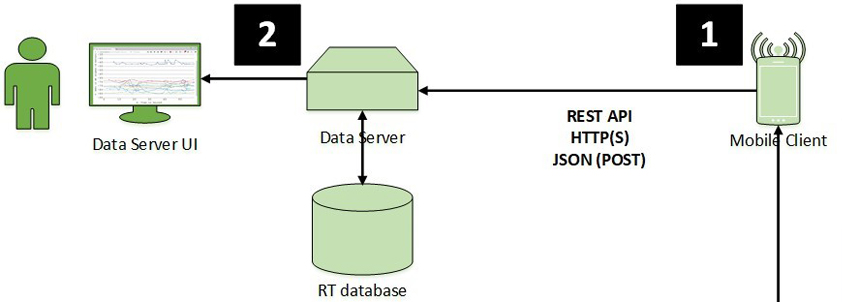
IELS: Indoor Equipment Localization System: Implementation (Part 3/6) (IoT) 08-02-202212-07-2018 by Maytham Fahmi Implementation 3.1 Software architecture The software architecture is based on three main components, Mobile Client, Data Server and Admin Server as shown in figure 3.1. Mobile Client is an Android application. Its main purpose is to collect iBeacon data such as RSSI-values and send it over to the data Server. Data Server is a Restful…. ShareTweetSharePin
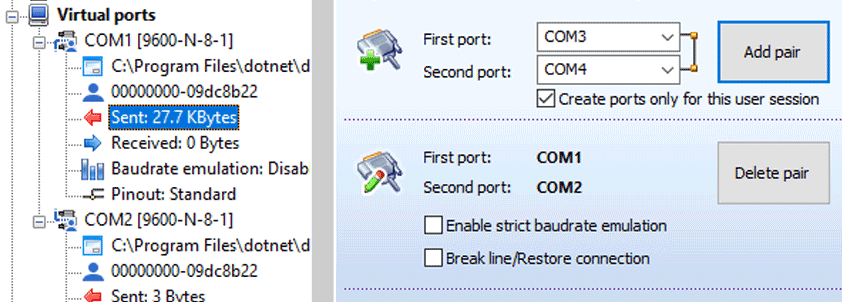
How to Create virtual COM port pairs in Windows for development (IoT) 31-07-202207-07-2018 by Maytham Fahmi Just imagine you are developing an embedded device or IoT device solution where you need to interact your software with a hardware device over a Com port. Normally you need to have your real device turn on and connect it to your development PC before you can interact with it. The challenge is that you…. ShareTweetSharePin